This observation about equatorial surfaces can be used as an aid to visualization as well.
First, imagine that we were beings who inhabited a two-dimensional universe. Visualizing three-dimensional space would (probably) not come naturally to us, and thus neither would visualizing
![]() , which needs to be embedded in at least three dimensions.
, which needs to be embedded in at least three dimensions.
However, we could visualize
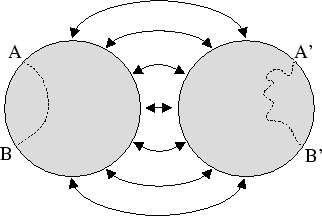
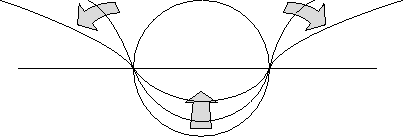
![]() by thinking of it as two disks, plus a special rule. The special rule goes like this: whenever you cross the boundary of one disk, you reappear at the corresponding point on the boundary of the other disk. Each disk is a hemisphere, and the boundary is the equator. Thought of this way, the rule becomes obvious: whenever you leave one hemisphere, and cross the equator, you reappear at the corresponding point in the other hemisphere.
by thinking of it as two disks, plus a special rule. The special rule goes like this: whenever you cross the boundary of one disk, you reappear at the corresponding point on the boundary of the other disk. Each disk is a hemisphere, and the boundary is the equator. Thought of this way, the rule becomes obvious: whenever you leave one hemisphere, and cross the equator, you reappear at the corresponding point in the other hemisphere.
Note that when our two dimensional being lays the two disks flat out in
![]() , there are two ways that they can be laid down. First, both disks can simply be flattened onto
, there are two ways that they can be laid down. First, both disks can simply be flattened onto
![]() . If this is done, then a vector pointing out of the sphere on the lower hemisphere will be pointing down from
. If this is done, then a vector pointing out of the sphere on the lower hemisphere will be pointing down from
![]() , and a vector pointing out of the sphere on the upper hemisphere will be pointing up on
, and a vector pointing out of the sphere on the upper hemisphere will be pointing up on
![]() . Alternately, the bottom hemisphere can be reflected or flipped, so that a vector pointing out on the sphere will be pointing up from
. Alternately, the bottom hemisphere can be reflected or flipped, so that a vector pointing out on the sphere will be pointing up from
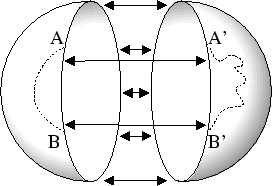
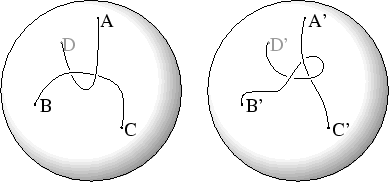
![]() , on both hemispheres. Note that this act of flipping means that we will have to be extra careful about how we identify the edges of the hemisphere; specifically, points will be mapped to the corresponding point on the hemisphere after the reflection. For practical purposes, we will consider the first model where the lower hemisphere is not flipped.
, on both hemispheres. Note that this act of flipping means that we will have to be extra careful about how we identify the edges of the hemisphere; specifically, points will be mapped to the corresponding point on the hemisphere after the reflection. For practical purposes, we will consider the first model where the lower hemisphere is not flipped.
Now, imagine that we are beings who inhabit a three dimensional universe (Hopefully this is not too hard). Visualizing four-dimensional space would not come naturally to us, and neither would visualizing
![]() , which needs to be embedded in at least four dimensions. But we can visualize the hypersphere by thinking of it as two filled balls, or filled
, which needs to be embedded in at least four dimensions. But we can visualize the hypersphere by thinking of it as two filled balls, or filled
![]() s, plus a special rule, just like in the two dimensional case.
s, plus a special rule, just like in the two dimensional case.
Finally, similarly to the two disks model of
![]() , we can flatten the hemispheres onto
, we can flatten the hemispheres onto
![]() without flipping one, or with flipping one. Just as before, we will use the model without the flip.
without flipping one, or with flipping one. Just as before, we will use the model without the flip.
Stereographic projection is a way of projecting
![]() onto
onto
![]() . Intuitively, it can be thought of as the process of puncturing the sphere and stretching it out flat, onto Euclidean space. It too can be used as an aid to visualization.
. Intuitively, it can be thought of as the process of puncturing the sphere and stretching it out flat, onto Euclidean space. It too can be used as an aid to visualization.
To stereographically project
![]() onto
onto
![]() , first choose an equator, and a ``north pole.'' In the case of
, first choose an equator, and a ``north pole.'' In the case of
![]() , the equator simply is two antipodal points on the circle, and the north pole is the point on the circle equally between them. For simplicity, let's assume the circle is the unit circle, the north pole is the point (0,1), and the equator the set of points
, the equator simply is two antipodal points on the circle, and the north pole is the point on the circle equally between them. For simplicity, let's assume the circle is the unit circle, the north pole is the point (0,1), and the equator the set of points
![]() . We are now going to map, or stereographically project, the circle onto the x axis.
. We are now going to map, or stereographically project, the circle onto the x axis.
The map is as follows: Draw a line from the north pole, through a point ![]() on the circle, and extend it until it hits the x-axis at the point
on the circle, and extend it until it hits the x-axis at the point ![]() . Stereographic projection is simply the map which takes each point
. Stereographic projection is simply the map which takes each point ![]() on the circle and maps it to the point
on the circle and maps it to the point ![]() in
in
![]() . In the case with
. In the case with
![]() , the map sends
, the map sends
![]() to
to
![]() .
.
Notice that every point on
![]() has an image on
has an image on
![]() , except for the north pole itself. The north pole is considered to be mapped to a point at infinity. So we can say that stereographic projection from
, except for the north pole itself. The north pole is considered to be mapped to a point at infinity. So we can say that stereographic projection from
![]() is a bijection.
is a bijection.
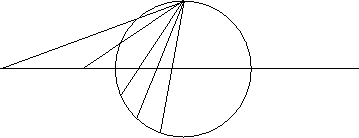
As mentioned above, stereographic projection can be thought of as puncturing the sphere, and stretching it out flat onto the correct Euclidean space. Points in the ``southern hemisphere'' are mapped to points between 1 and ![]() , and points in the ``northern hemisphere'' are mapped to points outside.
, and points in the ``northern hemisphere'' are mapped to points outside.
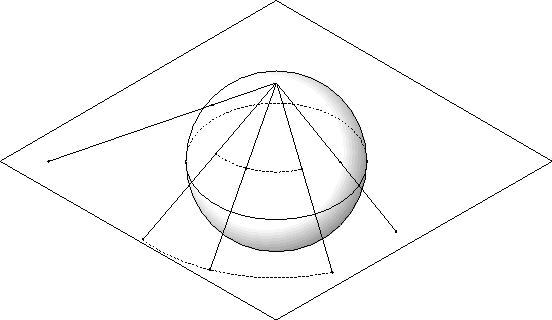
To stereographically project
![]() ,imagine
,imagine
![]() , centered at the origin. To project the sphere onto the x-y plane, we choose the ``north pole'' to be the point
, centered at the origin. To project the sphere onto the x-y plane, we choose the ``north pole'' to be the point ![]() . Then, to project a point
. Then, to project a point
![]() onto the x-y plane, we draw a line from the north pole, through
onto the x-y plane, we draw a line from the north pole, through
![]() to it's image point
to it's image point
![]() on the x-y plane.
on the x-y plane.
![]()
Again, the north pole is mapped to the point at infinity. Now the hypothetical two-dimensional beings have another way to visualize
![]() : they can think of it as regular
: they can think of it as regular
![]() , plus a point at infinity. If they were moving, say, a little square around the sphere, and watching how it's image changed in the plane as it moved, they would see it get larger as it got further from the south pole, which is mapped to the the origin on the plane. If they moved the square from the south pole, through the north pole, and back to the south pole, the two dimensional beings would see the square get larger and larger as it approached the north pole. When the north pole was inside the square, they would see the square all around them. As the square moved back to the south pole, they would see the square approaching from the other direction, getting smaller as it approached.
, plus a point at infinity. If they were moving, say, a little square around the sphere, and watching how it's image changed in the plane as it moved, they would see it get larger as it got further from the south pole, which is mapped to the the origin on the plane. If they moved the square from the south pole, through the north pole, and back to the south pole, the two dimensional beings would see the square get larger and larger as it approached the north pole. When the north pole was inside the square, they would see the square all around them. As the square moved back to the south pole, they would see the square approaching from the other direction, getting smaller as it approached.
Stereographic projection is possible in general, for
![]() . The map is:
. The map is:
![]()
Now we have another way to visualize the three sphere: we can think of it as
![]() , plus a point at infinity. If we were moving a cube around the three sphere, and looking at it's image in Euclidean three-space under stereographic projection, it would get bigger as it got further from the south pole, which is the origin in
, plus a point at infinity. If we were moving a cube around the three sphere, and looking at it's image in Euclidean three-space under stereographic projection, it would get bigger as it got further from the south pole, which is the origin in
![]() . Like the image of
. Like the image of
![]() in
in
![]() , if we were moving a cube along a great circle from the south pole, through the north pole, back to the south pole, we would see it start out small at the origin, get larger as it went further from the origin. When the north pole crossed inside the little cube, we would see the cube all around us. Then, as the square passed back towards the south pole, we would see it shrink again as it approached.
, if we were moving a cube along a great circle from the south pole, through the north pole, back to the south pole, we would see it start out small at the origin, get larger as it went further from the origin. When the north pole crossed inside the little cube, we would see the cube all around us. Then, as the square passed back towards the south pole, we would see it shrink again as it approached.
Stereographic projection offers another technique of visualizing or thinking about higher dimensional spheres, and another point of view on
![]() .
.